Problem statement
FashionMNIST Problem Statement
- Classify grayscale images of fashion items (e.g., shirts, shoes, bags) into one of 10 categories.
- Like MNIST, each image is 28×28 pixels, but the content is clothing-related instead of digits.
MNIST Problem Statement
- Classify grayscale images of handwritten digits (0–9) into their correct numeric labels.
- Each image is 28×28 pixels, and the task is a 10-class classification problem.
The mainstream PyTorch will solve FashionMNIST probelm. The minor stream of TensorFlow will demostarte how to solve MNIST problem.
Step 1. Data preparation
S - Collecting raw data
FashionMNIST Dataset
- Content: 70,000 grayscale images of fashion items (60,000 training + 10,000 test)
- Image size: 28×28 pixels
- Format: Same binary IDX format as MNIST
- train-images-idx3-ubyte.gz: training images
- train-labels-idx1-ubyte.gz: training labels
- t10k-images-idx3-ubyte.gz: test images
- t10k-labels-idx1-ubyte.gz: test labels
- Official link: https://github.com/zalandoresearch/fashion-mnis
MNIST Dataset
- Content: 70,000 grayscale images of handwritten digits (60,000 training + 10,000 test) Image size: 28×28 pixels
- Format: Binary IDX format (compressed .gz files)
- train-images-idx3-ubyte.gz: training images
- train-labels-idx1-ubyte.gz: training labels
- t10k-images-idx3-ubyte.gz: test images
- t10k-labels-idx1-ubyte.gz: test labels
- Official link: http://yann.lecun.com/exdb/mnist/
FashionMNIST is in format of PIL in pytorch namespace MNIST is in format of tensor digits in tensorflow namespace
S - [Tensor lib] How to encode inputs, outputs and paramters of a model
- We have raw datasets at hands
- How to encode them into the pytorch
- This is where is the first core feature of pytorch, tensor lib, comes into play
T - Tensor
torch.Tensor/torch.tensor()
- similar to numpy’s ndarrays, support matrix arithmetics
- optmized for running on GPUs and automatic differentiation
A Initialize tensor
# 1. from python list
import torch
x_data = torch.tensor([[1,2], [3,4]])
# 2. from numpy array
torch.from_numpy(np.array([[1,2], [3,4]]))
# 3. create random or constant values
shape = (2,3,)
torch.rand(shape)
torch.zeros(shape)
torch.ones(shape)
# Random Tensor:
# tensor([[0.8918, 0.9173, 0.4270],
# [0.3927, 0.7944, 0.0999]])
# Zeros Tensor:
# tensor([[0., 0., 0.],
# [0., 0., 0.]])
# Ones Tensor:
# tensor([[1., 1., 1.],
# [1., 1., 1.]])
# 4. from another tensor
## retain properties (shape and datatype) by default
torch.ones_like(x_data)
# tensor([[1, 1],
# [1, 1]])
## override datatype
torch.rand_like(x_data, dtype=torch.float)
# tensor([[0.7985, 0.1295],
# [0.4909, 0.2647]])
Data type
#1. tensor's .dtype, to get
## int is python default int64
tensor_int = torch.tensor([1,2])
tensor_int.dtype
# torch.int64
## float is python default float32
torch.tensor([1.0,2.0]).dtype
# torch.float32
#1. tensor's .to(), to convert
## convert int64 to float32
tensor_float = tensor_int.to(torch.float64)
# tensor_int is still torch.int64
# tensor_float is torch.float64, tensor([1., 2.], dtype=torch.float64)
Shape
tensor2d = torch.tensor([[1, 2, 3],
[4, 5, 6]])
#1. tensor's .shape, to get
tensor2d.shape
torch.rand(2,3).shape
# Shape of tensor: torch.Size([3, 4])
# pytroch has many syntax to run same function
# initial syntax for Lua version Torch
# new syntax for numpy like
#1.1 tensor's .reshape, to reshape, will auto copy data if not continous
# reshape to 3 * 2
tensor2d.reshape(3,2)
# tensor([[1, 2],
# [3, 4],
# [5, 6]])
#1.2 tensor's .view, is more used one, need the raw data is continous in memory
tensor2d.view(3, 2)
# tensor([[1, 2],
# [3, 4],
# [5, 6]])
Arithmetics
tensor2d = torch.tensor([[1, 2, 3],
[4, 5, 6]])
########### Addition ###########
#1.1 tensor's .sum(), add all values of a tensor into one value
agg = tensor2d.sum()
# tensor(21)
## .item(), convert single-element tensor to python numerical value
agg_item = agg.item()
print(agg_item, type(agg_item))
# 21 <class 'int'>
#1.2 tensor's .add(), add each value by a same value
tensor2d.add(5)
# tensor2d itself not changed
## tensor's _ suffix, is in-place operations that store result into rhe operand
tensor2d.add_(5)
# tensor2d itself is changed
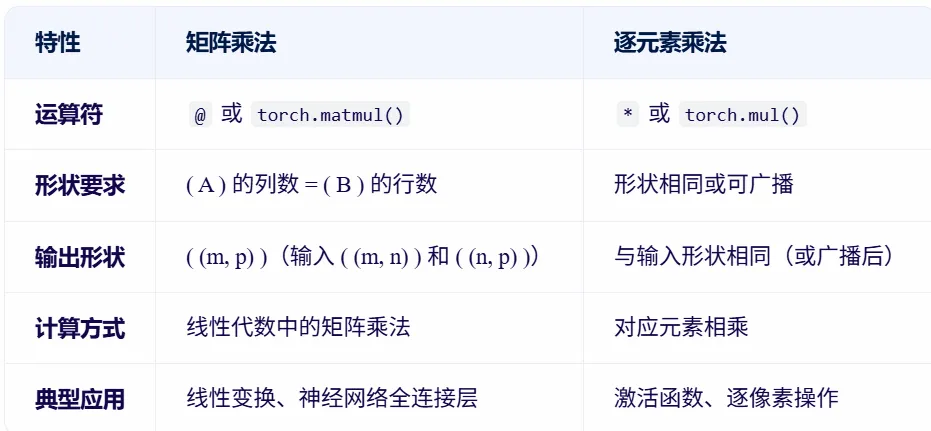
########### When dot product, Matrix Multiplication ###########
#2 tensor's .T, to transpose, interchange row and column
tensor2d.T
# tensor([[1, 4],
# [2, 5],
# [3, 6]])
#3.1 tensor's .matmul, matrix multiplication
tensor2d.matmul(tensor2d.T)
# tensor([[14, 32],
# [32, 77]])
#3.2 @ operator for tensors, more used one
tensor2d @ tensor2d.T
# tensor([[14, 32],
# [32, 77]])
########### Element-wise Multiplication ###########
# matrix multiplication
A = torch.rand(2, 3) # (2, 3)
B = torch.rand(3, 4) # (3, 4)
C = A @ B # (2, 4)
# element-wise multiplication
A = torch.rand(2, 3) # (2, 3)
B = torch.rand(2, 3) # (2, 3)
D = A * B # (2, 3)
Device
tensor2d = torch.tensor([[1, 2, 3],
[4, 5, 6]])
#1. tensor's .device, to get
tensor2d.device
# device(type='cpu')
# by default, tensors are on CPU
#1. tensor's .to(), to explictly move to GPU, copying is expensive in time and memory
device = "cuda" if torch.cuda.is_available() else "cpu"
tensor2d.to(device)
S - Encapsulate tensors and decople for better consumption
- We have lots of tensors at hands
- Code for processing data samples cane get messy and hard to maintain
- How to organize/encapsulate them for better consumption
- Decople dataset code from model training code for better readability and modularity
TA - Dataset and Dataloader
- We have four torch.Tensor for traning and testing including samples and labels
X_train = torch.tensor([
[-1.2, 3.1],
[-0.9, 2.9],
[-0.5, 2.6],
[2.3, -1.1],
[2.7, -1.5]
])
y_train = torch.tensor([0, 0, 0, 1, 1])
X_test = torch.tensor([
[-0.8, 2.8],
[2.6, -1.6],
])
y_test = torch.tensor([0, 1])
- torch.utils.data.dataset.Dataset/torch.utils.data.Dataset stores the samples and their corresponding labels into one object
- Inheritate PyTorch’s Dataset to self define
- _ _ init _ _() - initialize properties used by following methods, tensor object
- _ _ getitem _ _() - return single sample and label by index
- _ _ len _ _() - return samples length
from torch.utils.data import Dataset
class ToyDataset(Dataset):
def __init__(self, X, y):
self.features = X
self.labels = y
def __getitem__(self, index):
return self.features[index], self.labels[index]
def __len__(self):
return self.labels.shape[0]
train_ds = ToyDataset(X_train, y_train)
test_ds = ToyDataset(X_test, y_test)
# <__main__.ToyDataset object at 0x7f9a7cb46620>
train_ds[0]
# (tensor([-1.2000, 3.1000]), tensor(0))
x, y = test_ds[0][0], test_data[0][1]
- torch.utils.data.dataloader.DataLoader/torch.utils.data.DataLoadera() wraps an iterable around the Dateset to enable easy access to the samples.
- batch_size=2
- improve efficiency
- drop_last=True
- the last batch may smaller than others, could impact convergence
- drop the last batch
- shuffle=True
- Each epoch has same sequence of data, could impact training
- Shuffle data sequence among epoches
- use torch.manual_seed(123) to set seed, to get same order of shuffling
- num_workers=4
- start numtiple worker processes to load data paralelly, to feed GPU
- batch_size=2
from torch.utils.data import DataLoader
torch.manual_seed(123)
train_loader = DataLoader(
dataset=train_ds,
batch_size=2,
shuffle=True,
num_workers=0
)
test_loader = DataLoader(
dataset=test_ds,
batch_size=2,
shuffle=False,
num_workers=0
)
# <torch.utils.data.dataloader.DataLoader object at 0x7f9a7cf0d930>
############ dataloader is an iterable ############
#1. get one batch of data (samples and labels)
i = iter(train_loader) # creates an iterator
data = next(i) # retrieves the first batch from that iterator
# [tensor([[ 2.3000, -1.1000],
# [-0.9000, 2.9000]]), tensor([1, 0])]
# [tensor(of size 2), tensor(of size 2)]
#2. get each batch of data (samples and labels)
for X, y in test_loader:
print(X.shape)
print(y.shape)
break
# torch.Size([2, 2])
# torch.Size([2])
#3. get one batch of data (samples and labels), with batch index
e = enumerate(test_loader) # enumerator is an interator with index
batch, (X, y) = next(e)
# (0, [tensor([[-0.8000, 2.8000],
# [ 2.6000, -1.6000]]), tensor([0, 1])])
# (0, [tensor(of size 2), tensor(of size 2)])
# 4. get each batch of data (samples and labels), with index
for batch_id, (X, y) in enumerate(test_loader):
print(batch_id)
print(X.shape)
print(y.shape)
break
# 0
# torch.Size([2, 2])
# torch.Size([2])
############ dataloader progress ############
# Batch is based on loader
test_loader
# <torch.utils.data.dataloader.DataLoader object at 0x7f9a7cf0d930>
# 1. total batch num
num_batches = len(test_loader)
# 2. every 100 batch
for batch, (X, y) in enumerate(test_loader):
if batch % 100 == 0:
print(batch)
# 0,1,2,3,...,60000/64
# data is based on loader.dataset
test_loader.dataset
# <__main__.ToyDataset object at 0x7f9b4e0dcdc0>
# 3. total sample num
len(test_loader.dataset)
# 60000
# 4. current sample num
for batch, (X, y) in enumerate(test_loader):
if batch % 100 == 0:
print((batch + 1) * len(X))
S - Data preprocessing (enhancement, normalization)
- Data does not always come in its final processed form that is required for training machine learning algorithms
- Need to perform some manipulation of the data and make it suitable for training
T - transform
Load the pre-defined FashionMNIST datasets from torchvision.datasets.FashionMNIST()
- encapsulate raw data by datasets
- root - is the path where the train/test data is stored
- train - specifies training or test dataset
- download=True - downloads the data from the internet if it’s not available at root
Preprocessing the datasets
- transforms - We use transforms to perform some manipulation of the data and make it suitable for training.
| FashionMNIST | Features | Labels |
|---|---|---|
| Original | in PIL Image format | integers |
| Parameter. Both accept callables containing the transformation logic | transform to modify the features | target_transform to modify the labels |
| Callables | ToTensor() converts a PIL image into a FloatTensor and scales the image’s pixel intensity values in the range [0., 1.] transform=ToTensor(), |
Lambda transforms apply any user-defined lambda function. Here, we define a function to turn the integer into a one-hot encoded tensor. It first creates a zero tensor of size 10 (the number of labels in our dataset) and calls scatter_ which assigns a value=1 on the index as given by the label y. py target_transform = Lambda(lambda y: torch.zeros(10, dtype=torch.float).scatter_(dim=0, index=torch.tensor(y), value=1)) |
| Trainig req | as normalized tensors | as one-hot encoded tensors. |
A2 - PT on MNIST
from torchvision import datasets
from torchvision.transforms import ToTensor
# Download training data from open datasets.
training_data = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor(),
)
# Download test data from open datasets.
test_data = datasets.FashionMNIST(
root="data",
train=False,
download=True,
transform=ToTensor(),
)
from torch.utils.data import DataLoader
batch_size = 3
train_dataloader = DataLoader(training_data, batch_size=batch_size)
test_dataloader = DataLoader(test_data, batch_size=batch_size)
A2 - TF on MNIST
Load the MNIST from tf.keras.datasets.mnist.load_data() Originally
- pixel values of the images range from 0 through 255
- they are all numpy.ndarray
Normalization
- Scale these values to a range of 0 to 1 by dividing the values by 255.0.
- Above also converts the sample data from integers to floating-point numbers
import tensorflow as tf
mnist = tf.keras.datasets.mnist
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train, x_test = x_train / 255.0, x_test / 255.0
Summary
PT
from torchvision import datasets
from torchvision.transforms import ToTensor
from torch.utils.data import DataLoader
batch_size = 3
# Download training data from open datasets.
training_data = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor(),
)
# Download test data from open datasets.
test_data = datasets.FashionMNIST(
root="data",
train=False,
download=True,
transform=ToTensor(),
)
train_dataloader = DataLoader(training_data, batch_size=batch_size)
test_dataloader = DataLoader(test_data, batch_size=batch_size)
TF
import tensorflow as tf
mnist = tf.keras.datasets.mnist
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train, x_test = x_train / 255.0, x_test / 255.0
Step2. Model definition
S - [DL lib] Define the model/neural network
T - DL lib torch.nn namespace provides all the building blocks you need to build your own neural network
- inherits from nn.Module
- _ _ init _ _() function - define the layers of the network
- forward function - specify how data will pass through the network. This forms the computing graph
- move the model also to the accelerator.
- Input - a sample minibatch of 3 images of size 28x28
input_image = torch.rand(3,28,28)
print(input_image.size())
# torch.Size([3, 28, 28])
- initialize the nn.Flatten layer to convert each 2D 28x28 image into a contiguous array of 784 pixel values
flatten = nn.Flatten()
flat_image = flatten(input_image)
print(flat_image.size())
# torch.Size([3, 784])
- nn.Linear layer is a module that applies a linear transformation on the input using its stored weights and biases.
layer1 = nn.Linear(in_features=28*28, out_features=20)
hidden1 = layer1(flat_image)
print(hidden1.size())
# torch.Size([3, 20])
- nn.ReLU non-linear activations are applied after linear transformations to introduce nonlinearity, helping neural networks learn a wide variety of phenomena.
print(f"Before ReLU: {hidden1}\n\n")
hidden1 = nn.ReLU()(hidden1)
print(f"After ReLU: {hidden1}")
- nn.Sequential is an ordered container of modules. The data is passed through all the modules in the same order as defined.
seq_modules = nn.Sequential(
flatten,
layer1,
nn.ReLU(),
nn.Linear(20, 10)
)
A
from torch import nn
# Define model
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten()
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512),
nn.ReLU(),
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10)
)
def forward(self, x):
x = self.flatten(x)
logits = self.linear_relu_stack(x)
return logits
import torch
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = NeuralNetwork().to(device)
print(model)
# NeuralNetwork(
# (flatten): Flatten(start_dim=1, end_dim=-1)
# (linear_relu_stack): Sequential(
# (0): Linear(in_features=784, out_features=512, bias=True)
# (1): ReLU()
# (2): Linear(in_features=512, out_features=512, bias=True)
# (3): ReLU()
# (4): Linear(in_features=512, out_features=10, bias=True)
# )
# )
# Every param with requires_grad=True will be trained and updated ruding training.
# Accee weight of one layer
model.layers[0].weight
# Accee bias of one layer
model.layers[0].bias
# Check all trainable params of one model
sum(p.numel() for p in model.parameters() if p.requires_grad)
TF
PT: nn.Linear(in_features, out_features)
- in_features: input dimension
- out_features: output dimension = number of neurons in the layer
TF: tf.keras.layers.Dense(units)
- units: Number of neurons in the layer = output dimension
- Input dimension is inferred from the previous layer or specified using input_shape.
model = tf.keras.models.Sequential([
tf.keras.layers.Flatten(input_shape=(28, 28)),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(10)
])
Step3. Training loop
S - Move data and model to GPU
model = model.to(device)
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device)
S - Training
T 1. Put model in training mode
model.train()
📌 Evaluation turns off dropout model.eval()
📌 Inference turns off dropout model.eval()
2. Forward pass/predict
 Dynamic computation graph
Dynamic computation graph
- Dynamic
- Computation graph is constructed on-the-fly when you really forward pass.
- Every foward pass will build a new computation graph to accomodate current input data
- Computation graph
- Is a directed graph
- List all the computing sequnce, which will be used later to calculate gradient when backpropagation.
- How
- As long as one of the end node is set with required_grad=True, PyTorch will build a computing graph by default accroding to foward().
pred = model(X)
# tensor([[-1.0240e-01, 6.9089e-02, ...
How to use the pred result
pred = model(x)
pred
# tensor([[-2.6683, -3.2515, -1.3364, -2.3363, -1.3656, 3.0426, -1.2521, 3.0325,
# 2.0545, 3.5086]], grad_fn=<AddmmBackward0>)
pred[0]
# tensor([-2.6683, -3.2515, -1.3364, -2.3363, -1.3656, 3.0426, -1.2521, 3.0325,
# 2.0545, 3.5086], grad_fn=<SelectBackward0>)
pred[0].argmax(0)
# tensor(9)
# if pred is a matrix
# (pred.argmax(1) == y).type(torch.float).sum().item()
📌 Evaluation No backpropagation, no training, no need to build computation graph to save memory with torch.no_grad(): out = model(X)
📌 Inference No backpropagation, no training, no need to build computation graph to save memory with torch.no_grad(): out = model(X)
3. Calculate loss/prediction error with Loss function (CrossEntropyLoss, MSELoss) Return logits in last layer in pytorch
- Pytorch’s loss function (CrossEntropyLoss) will apply softmax for logits internally, and use more stable way like log-softmax + NLLLoss to avoid overflow and underflow
loss_fn = nn.CrossEntropyLoss()
loss = loss_fn(pred, y)
# tensor(2.3065, grad_fn=<NllLossBackward0>)
📌 Evaluation Need this step to show loss only.
📌 Inference No need this step. But need to softmax the output logits=[2.0,1.0,0.1] probs=softmax(logits)
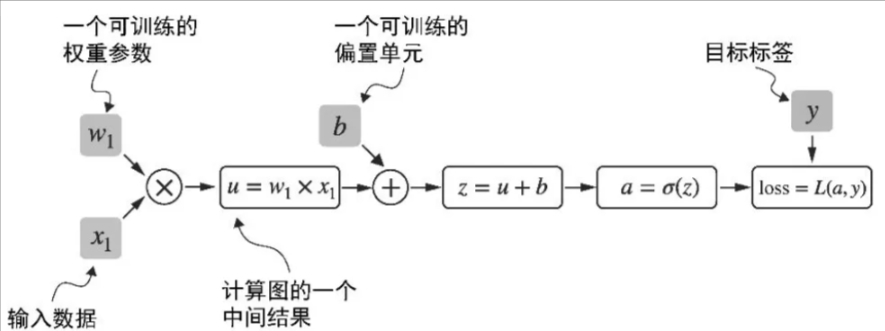
4. Backpropogation to compute gradient Calculate loss’s garident to w1 by grad()
import torch.nn.functional as F
from torch.autograd import grad
y = torch.tensor([1.0])
x1 = torch.tensor([1.1])
w1 = torch.tensor([2.2], requires_grad=True)
b = torch.tensor([0.0], requires_grad=True)
z = x1 * w1 + b
a = torch.sigmoid(z)
loss = F.binary_cross_entropy(a, y)
grad_L_w1 = grad(loss, w1, retain_graph=True)
grad_L_b = grad(loss, b, retain_graph=True)
print(grad_L_w1)
print(grad_L_b)
# (tensor([-0.0898]),)
# (tensor([-0.0817]),)
PyTorch provides Autograd to automate this process: loss.backward()
- Compute the gradients of all leaf nodes in the computation graph.
- These gradients are stored in the .grad attribute of the tensors
loss.backward()
print(w1.grad)
print(b.grad)
# tensor([-0.0898])
# tensor([-0.0817])
📌 Evaluation No need this step.
📌 Inference No need this step.
5. Update parameters with Optimizer (SGD, Adam, AdamW)
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3)
# params:params to be optimized, normally model.parameters()
# lr:learning rate
# Gradients accumulate by default in PyTorch (i.e., they are not overwritten), so you need to zero them out before the next backward pass.
optimizer.zero_grad()
# Computes the gradients of the loss with respect to all model parameters (i.e., performs backpropagation).
# loss.backward()
# Applies the optimization algorithm (e.g., SGD, Adam) to adjust the weights to minimize the loss.
optimizer.step()
📌 Evaluation No need this step.
📌 Inference No need this step.
S - Epochs loop
epochs = 5
for t in range(epochs):
print(f"Epoch {t} ------------------------------")
train()
Summary
def train(dataloader, model, loss_fn, optimizer):
model.train()
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device)
# Compute prediction error
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3)
epochs = 5
for t in range(epochs):
print(f"Epoch {t} ------------------------------")
train(train_dataloader, model, loss_fn, optimizer)
TF on MNIST Why from_logits=True?
- If your model’s final layer does not include a Softmax activation (i.e., it outputs raw scores or “logits”), you must set from_logits=True.
- This tells TensorFlow to apply softmax internally before computing the cross-entropy loss.
loss_fn = tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True)
optimizer='adam'
model.compile(optimizer='adam',
loss=loss_fn,
metrics=['accuracy'])
model.fit(x_train, y_train, epochs=5)
Step 5. Model usage/inference
classes = [
"T-shirt/top",
"Trouser",
"Pullover",
"Dress",
"Coat",
"Sandal",
"Shirt",
"Sneaker",
"Bag",
"Ankle boot",
]
model.eval()
x, y = test_data[0][0], test_data[0][1]
with torch.no_grad():
x = x.to(device)
pred = model(x)
predicted, actual = classes[pred[0].argmax(0)], classes[y]
print(f'Predicted: "{predicted}", Actual: "{actual}"')
Step 5.Model evaluation
S - Show progress with loss and accuracy
T
Train
Every 100 batch and overall data process, show the loss
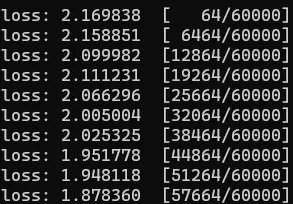
>7f denotes
> right aligned
7 overall width is 7 chars
f show float
size = len(dataloader.dataset)
for batch, (X, y) in enumerate(dataloader):
if batch % 100 == 0:
loss, current = loss.item(), (batch + 1) * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
Test Each epoch, show average loss by batch
test_loss = 0
for every batch:
test_loss += loss_fn(pred,y).item()
num_batches = len(dataloader)
test_loss /= num_batches
Each epoch, show the accurate sample number
correct = 0
for:
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
size = len(dataloader.dataset)
correct /= size
- pred.argmax(1):get index of highest value
- == y:compare with target
- .type(torch.float): convert bool to float
- .sum(): sum each sample
- .item(): covnert to python datatype
A
def train(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
model.train()
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device)
# Compute prediction error
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
optimizer.zero_grad()
loss.backward()
optimizer.step()
if batch % 100 == 0:
loss, current = loss.item(), (batch + 1) * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
def test(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss, correct = 0, 0
model.eval()
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3)
epochs = 5
for t in range(epochs):
print(f"Epoch {t}------------------------------")
train(train_dataloader, model, loss_fn, optimizer)
test(test_dataloader, model, loss_fn)
print("Done!")
TF on MNIST
model.evaluate(x_test, y_test, verbose=2)
Step 6. Model checkpoint save and load
T
Model has
- structure
- internal state dictionary (containing the model parameters)
- 像 AdamW 这样的自适应优化器可以为每个模型权重存储额外的参数。AdamW 可以使用历史数据动态地调整每个模型参数的学习率。
Save a model
- is to serialize the internal state dictionary to a file .pth
Load a model includes
- re-creating the model structure
- loading the state dictionary into it.
A
torch.save(model.state_dict(), "model.pth")
model = NeuralNetwork().to(device)
model.load_state_dict(torch.load("model.pth", weights_only=True))
# save
torch.save({
"model_state_dict": model.state_dict(),
"optimizer_state_dict": optimizer.state_dict(),
},
"model_and_optimizer.pth"
)
# load
checkpoint = torch.load("model_and_optimizer.pth", weights_only=True)
model = GPTModel(GPT_CONFIG_124M)
model.load_state_dict(checkpoint["model_state_dict"])
optimizer = torch.optim.AdamW(model.parameters(), lr=0.0005, weight_decay=0.1)
optimizer.load_state_dict(checkpoint["optimizer_state_dict"])
model.train()
Conclusion
PT
from torchvision import datasets
from torchvision.transforms import ToTensor
# Download training data from open datasets.
training_data = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor(),
)
# Download test data from open datasets.
test_data = datasets.FashionMNIST(
root="data",
train=False,
download=True,
transform=ToTensor(),
)
from torch.utils.data import DataLoader
batch_size = 3
# Create data loaders.
train_dataloader = DataLoader(training_data, batch_size=batch_size)
test_dataloader = DataLoader(test_data, batch_size=batch_size)
from torch import nn
# Define model
class NeuralNetwork(nn.Module):
def __init__(self):
super().__init__()
self.flatten = nn.Flatten()
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512),
nn.ReLU(),
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10)
)
def forward(self, x):
x = self.flatten(x)
logits = self.linear_relu_stack(x)
return logits
import torch
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = NeuralNetwork().to(device)
print(model)
def train(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
model.train()
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device)
# Compute prediction error
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
loss.backward()
optimizer.step()
optimizer.zero_grad()
if batch % 100 == 0:
loss, current = loss.item(), (batch + 1) * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
def test(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
model.eval()
test_loss, correct = 0, 0
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3)
epochs = 5
for t in range(epochs):
print(f"Epoch {t}\n-------------------------------")
train(train_dataloader, model, loss_fn, optimizer)
test(test_dataloader, model, loss_fn)
print("Done!")
classes = [
"T-shirt/top",
"Trouser",
"Pullover",
"Dress",
"Coat",
"Sandal",
"Shirt",
"Sneaker",
"Bag",
"Ankle boot",
]
model.eval()
x, y = test_data[0][0], test_data[0][1]
with torch.no_grad():
x = x.to(device)
pred = model(x)
predicted, actual = classes[pred[0].argmax(0)], classes[y]
print(f'Predicted: "{predicted}", Actual: "{actual}"')
TF
import tensorflow as tf
mnist = tf.keras.datasets.mnist
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train, x_test = x_train / 255.0, x_test / 255.0
model = tf.keras.models.Sequential([
tf.keras.layers.Flatten(input_shape=(28, 28)),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dropout(0.2),
tf.keras.layers.Dense(10)
])
loss_fn = tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True)
optimizer='adam'
model.compile(optimizer='adam',
loss=loss_fn,
metrics=['accuracy'])
model.fit(x_train, y_train, epochs=5)
model.evaluate(x_test, y_test, verbose=2)