S - Run on GPU
T - Kernel & Kernel Launch
- Host: CPU HW itself
- Device: GPU HW itself
- Kernel: function that run on GPU
- Kernel launch: run kernel from host
- Kernenel execution configuration
A
CPU
void c_hello(){
printf("Hello World!\n");
}
int main() {
c_hello();
return 0;
}
hello.cu
__global__ void cuda_hello(){
printf("Hello World from GPU!\n");
}
int main() {
cuda_hello<<<1,1>>>();
return 0;
}
- _ _ global _ _ specifier, specify a function as kernel
- cuda_hello(); host code call, called kernel launch
- «<N,N»> syntax, provides kernenel execution configuration
Compile & run
nvcc hello.cu -o hello
./hello
- The CUDA hello world example does nothing, and even if the program is compiled, nothing will show up on screen.
S - Load data from CPU to GPU
T - memory transfer
- Memory transfer: data move between host and device
- For data to be accessible by GPU, it must be presented in the device memory. CUDA provides APIs for device memory mgmt and data transfer between host and device memory.
cudaMalloc(void **devPtr, size_t count);
cudaFree(void *devPtr);
- cudaMalloc() allocates memory of size count in the device memory and updates the device pointer devPtr to the allocated memory.
- cudaFree() deallocates a region of the device memory where the device pointer devPtr points to. They are comparable to malloc() and free() in C, respectively
cudaMemcpy(void *dst, void *src, size_t count, cudaMemcpyKind kind)
- cudaMemcpy copy a memory of size count from src to dst. kind indicates the direction. For typical usage, the value of kind is either cudaMemcpyHostToDevice or cudaMemcpyDeviceToHost. similar to memcpy in C.
Common workflow of CUDA programs
- Define kernel
- Allocate host memory & initialized host data
- Allocate device memory & Transfer input data from host to device memory
- Execute kernels
- Transfer output from device memory to host
- Verification & others
- Free device memory & host memeory
A
Vector addition implemented in C
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <assert.h>
#define N 10000000
#define MAX_ERR 1e-6
void vector_add(float *out, float *a, float *b, int n) {
for(int i = 0; i < n; i++){
out[i] = a[i] + b[i];
}
}
int main(){
float *a, *b, *out;
// Allocate memory
a = (float*)malloc(sizeof(float) * N);
b = (float*)malloc(sizeof(float) * N);
out = (float*)malloc(sizeof(float) * N);
// Initialize array
for(int i = 0; i < N; i++){
a[i] = 1.0f;
b[i] = 2.0f;
}
// Main function
vector_add(out, a, b, N);
// Verification
for(int i = 0; i < N; i++){
assert(fabs(out[i] - a[i] - b[i]) < MAX_ERR);
}
printf("out[0] = %f\n", out[0]);
printf("PASSED\n");
}
cuda
cp vector_add.c vector_add.cu
# Convert vector_add() to GPU kernel
__global__ void vector_add(float *out, float *a, float *b, int n) {
for(int i = 0; i < n; i++){
out[i] = a[i] + b[i];
}
}
# Change vector_add() call in main() to kernel call
vector_add<<<1,1>>>(out, a, b, N);
working
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <assert.h>
#include <cuda.h>
#include <cuda_runtime.h>
#define N 10000000
#define MAX_ERR 1e-6
__global__ void vector_add(float *out, float *a, float *b, int n) {
for(int i = 0; i < n; i ++){
out[i] = a[i] + b[i];
}
}
int main(){
float *a, *b, *out;
float *d_a, *d_b, *d_out;
// Allocate host memory
a = (float*)malloc(sizeof(float) * N);
b = (float*)malloc(sizeof(float) * N);
out = (float*)malloc(sizeof(float) * N);
// Initialize host arrays
for(int i = 0; i < N; i++){
a[i] = 1.0f;
b[i] = 2.0f;
}
// Allocate device memory
cudaMalloc((void**)&d_a, sizeof(float) * N);
cudaMalloc((void**)&d_b, sizeof(float) * N);
cudaMalloc((void**)&d_out, sizeof(float) * N);
// Transfer data from host to device memory
cudaMemcpy(d_a, a, sizeof(float) * N, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, b, sizeof(float) * N, cudaMemcpyHostToDevice);
// Executing kernel
vector_add<<<1,1>>>(d_out, d_a, d_b, N);
// Transfer data back to host memory
cudaMemcpy(out, d_out, sizeof(float) * N, cudaMemcpyDeviceToHost);
// Verification
for(int i = 0; i < N; i++){
assert(fabs(out[i] - a[i] - b[i]) < MAX_ERR);
}
printf("out[0] = %f\n", out[0]);
printf("PASSED\n");
// Deallocate device memory
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_out);
// Deallocate host memory
free(a);
free(b);
free(out);
}
S - Performance profiling
T - Nsight Systems (nsys)
time - does not give much information about the program performance
time ./vector_add
real 0m2.316s
user 0m0.221s
sys 0m0.109s
nvprof - NVIDIA provides a commandline profiler tool called nvprof, which give a more insight information of CUDA program performance.
nsys - NVIDIA Nsight Systems, Included in CUDA toolkit
# 使用 nsys 运行你的程序
nsys profile ./your_cuda_program
# 如果你只关心 kernel 执行时间,可以加上过滤参数:
nsys profile --trace=cuda ./your_program
# --trace=cuda
# 只跟踪 CUDA 相关的活动,比如:
# CUDA kernel 启动与执行时间
# CUDA memory copy(如 cudaMemcpy)
# CUDA API 调用(如 cudaMalloc, cudaFree 等)
# 使用 Nsight Systems GUI 查看
nsys-ui my_report
# 在 Timeline 视图中,找到 CUDA Kernels 的轨道(track)。
# 你可以看到每个 kernel 的执行时间(以微秒或毫秒为单位)
# 命令行
nsys stats my_report.qdrep
# all info
# 提取 CUDA kernel 执行统计信息,并在终端中以表格形式展示
nsys stats --report cuda_gpu_kern_sum rep1-1.nsys-rep
# ** CUDA GPU Kernel Summary (cuda_gpu_kern_sum):
# Time (%) Total Time (ns) Instances Avg (ns) Med (ns) Min (ns) Max (ns) StdDev (ns) Name
# -------- --------------- --------- --------------- --------------- ------------- ------------- ----------- ------------------------------------------
# 100.0 1,976,843,072 1 1,976,843,072.0 1,976,843,072.0 1,976,843,072 1,976,843,072 0.0 add_tensor(float *, float *, float *, int)
# 每个 kernel 的总执行时间
# 调用次数(Instances)
# 平均、最小、最大执行时间
# 想导出为 CSV 文件用于进一步分析
nsys stats --report cuda_gpu_kern_sum --format csv my_report.qdrep > kernel_stats.csv
# 100.0,1976843072,1,1976843072.0,1976843072.0,1976843072,1976843072,0.0,"add_tensor(float *, float *, float *, int)"
A
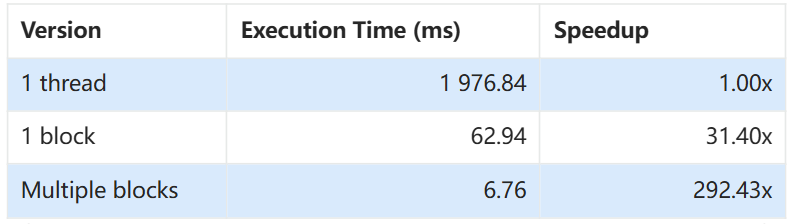
- 说configuration太简单了 -> version
- 用«<»>说的太代码了不直观 -> 直接说明单词
- ns说的太代码了太长了不直观,不容易对比 -> For execution, fatest execution is minimum base with readable unit -> Only two digits after dot, right-aligned
- 倍数具体点,不要00倍,不然像编造的 -> For speedup, slowest execution is base as 1.00x
S - Run on GPU in parallel
T - multithread with kernel execution configuration
- CUDA use a kernel execution configuration «<…»> to tell CUDA runtime how many threads to launch on GPU
<<< M , T >>>
- indicate that a kernel launches with a grid of M thread blocks. Each thread block has T parallel threads.
- gridDim, blockDim
- «<1,1»> indicates that the kernel is launched with only 1 thread
Using a thread block with 256 threads
Launch CUDA GPUs run kernels using blocks of threads that are a multiple of 32 in size; 256 threads is a reasonable size to choose.
// Kernel launch
vector_add <<< 1 , 256 >>> (d_out, d_a, d_b, N);
tid CUDA provides built-in variables for accessing thread information.
- blockDim.x contains the size of thread block (number of threads in the thread block)
- threadIdx.x contains the index of the thread within the block
- For the vector_add() configuration, the value of threadIdx.x ranges from 0 to 255 and the value of blockDim.x is 256

Code One thread computes vector addition by iterating through the whole arrays
- For the k-th thread, the loop starts from k-th element and iterates through the array with a loop stride of 256.
- For example, in the 0-th iteration, the k-th thread computes the addition of k-th element. In the next iteration, the k-th thread computes the addition of (k+256)-th element, and so on.
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <assert.h>
#include <cuda.h>
#include <cuda_runtime.h>
#define N 10000000
#define MAX_ERR 1e-6
__global__ void vector_add(float *out, float *a, float *b, int n) {
int index = threadIdx.x; // each thread exe this kernel will has different idx, thus compute different postion of element
int stride = blockDim.x; //stride步距,步幅
for(int i = index; i < n; i += stride){
out[i] = a[i] + b[i];
}
}
int main(){
float *a, *b, *out;
float *d_a, *d_b, *d_out;
// Allocate host memory
a = (float*)malloc(sizeof(float) * N);
b = (float*)malloc(sizeof(float) * N);
out = (float*)malloc(sizeof(float) * N);
// Initialize host arrays
for(int i = 0; i < N; i++){
a[i] = 1.0f;
b[i] = 2.0f;
}
// Allocate device memory
cudaMalloc((void**)&d_a, sizeof(float) * N);
cudaMalloc((void**)&d_b, sizeof(float) * N);
cudaMalloc((void**)&d_out, sizeof(float) * N);
// Transfer data from host to device memory
cudaMemcpy(d_a, a, sizeof(float) * N, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, b, sizeof(float) * N, cudaMemcpyHostToDevice);
// Executing kernel
vector_add<<<1,256>>>(d_out, d_a, d_b, N);
// Transfer data back to host memory
cudaMemcpy(out, d_out, sizeof(float) * N, cudaMemcpyDeviceToHost);
// Verification
for(int i = 0; i < N; i++){
assert(fabs(out[i] - a[i] - b[i]) < MAX_ERR);
}
printf("PASSED\n");
// Deallocate device memory
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_out);
// Deallocate host memory
free(a);
free(b);
free(out);
}
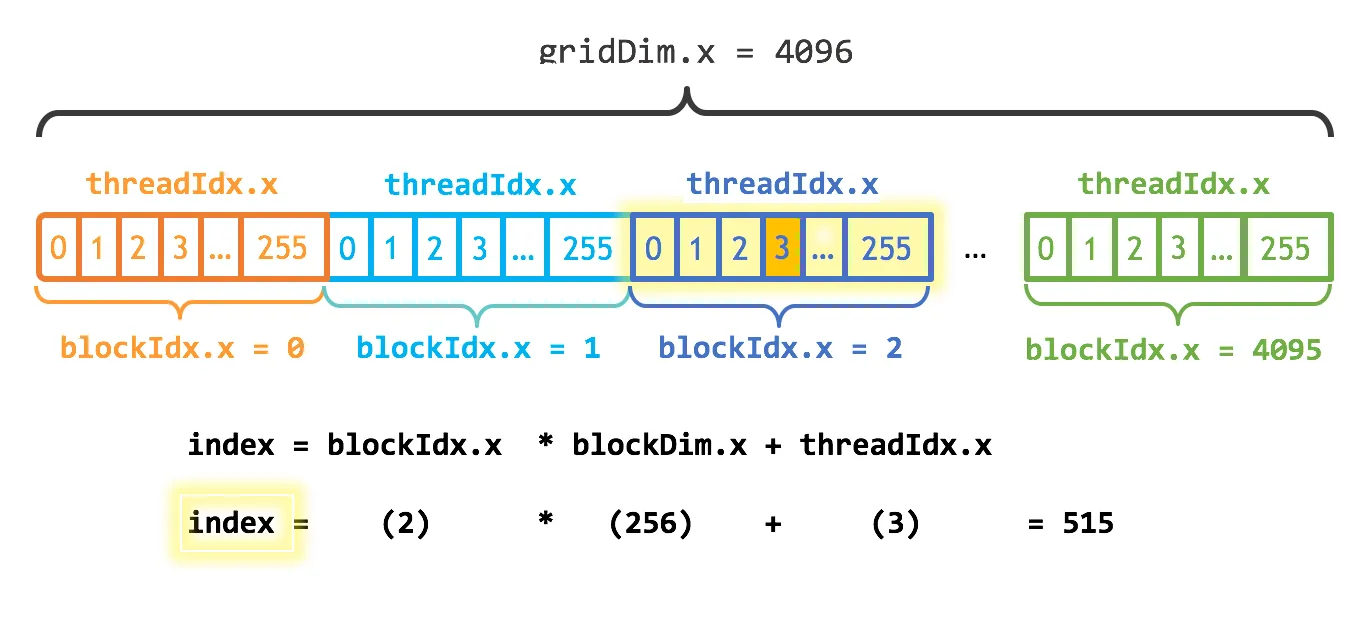
Adding more thread blocks
Launch Since I have N elements to process, and 256 threads per block, I just need to calculate the number of blocks to get at least N threads. I simply divide N by the block size (being careful to round up in case N is not a multiple of blockSize).
int block_dim = 256;
int grid_dim = (N + block_dim) / block_dim;
add<<<grid_dim, block_dim>>>(N, x, y);
tid
- gridDim.x contains the size of the grid
- blockIdx.x contains the index of the block with in the grid
- gridDim = N/256 = 4096
- blockDim = 256
- tid = blockIdx * blockDim +threadIdx
Code
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <assert.h>
#include <cuda.h>
#include <cuda_runtime.h>
#define N 10000000
#define MAX_ERR 1e-6
__global__ void vector_add(float *out, float *a, float *b, int n) {
int tid = blockIdx.x * blockDim.x + threadIdx.x;
// Handling arbitrary vector size
if (tid < n){
out[tid] = a[tid] + b[tid];
}
int index = blockIdx.x * blockDim.x + threadIdx.x;
int stride = blockDim.x * gridDim.x;
for (int i = index; i < n; i += stride)
y[i] = x[i] + y[i];
int numBlocks = (N + blockSize - 1) / blockSize;
}
int main(){
float *a, *b, *out;
float *d_a, *d_b, *d_out;
// Allocate host memory
a = (float*)malloc(sizeof(float) * N);
b = (float*)malloc(sizeof(float) * N);
out = (float*)malloc(sizeof(float) * N);
// Initialize host arrays
for(int i = 0; i < N; i++){
a[i] = 1.0f;
b[i] = 2.0f;
}
// Allocate device memory
cudaMalloc((void**)&d_a, sizeof(float) * N);
cudaMalloc((void**)&d_b, sizeof(float) * N);
cudaMalloc((void**)&d_out, sizeof(float) * N);
// Transfer data from host to device memory
cudaMemcpy(d_a, a, sizeof(float) * N, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, b, sizeof(float) * N, cudaMemcpyHostToDevice);
// Executing kernel
int block_dim = 256;
int grid_dim = ((N + block_dim) / block_dim);
vector_add<<<grid_dim, block_dim>>>(d_out, d_a, d_b, N);
// Transfer data back to host memory
cudaMemcpy(out, d_out, sizeof(float) * N, cudaMemcpyDeviceToHost);
// Verification
for(int i = 0; i < N; i++){
assert(fabs(out[i] - a[i] - b[i]) < MAX_ERR);
}
printf("PASSED\n");
// Deallocate device memory
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_out);
// Deallocate host memory
free(a);
free(b);
free(out);
}
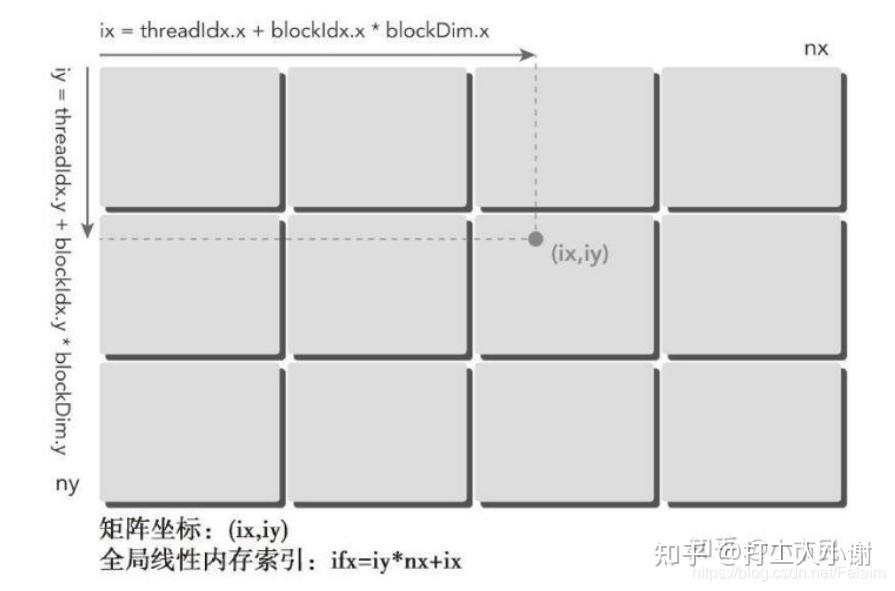
2D & 3D threads
| fixed | vary |
|---|---|
| gridDim | blockIdx |
| blockDim | threadIdx |
| CUDA 维度 | 图像/体积数据中的含义 | 常见用途示例 |
|---|---|---|
| x | Width(宽度) | 图像的列、体素的横向维度 |
| y | Height(高度) | 图像的行、体素的纵向维度 |
| z | Depth / Length(深度/长度) | 视频帧、3D 图像的切片或时间维度 |
Launch
dim3 grid_dim(grid_dim_x, grid_dim_y, grid_dim_z);
dim3 block_dim(block_dim_x, block_dim_y, block_dim_z);
kernel<<<grid_dim, block_dim>>>(d_MatA, d_MatB, d_MatC, nx, ny);
tid
// 2D
int tid_x = threadIdx.x + blockIdx.x * blockDim.x;
int tid_y = threadIdx.y + blockIdx.y * blockDim.y;
// 2D mapping to 1D
int tid = tid_y * (gridDim.x * blockDim.x) + tid_x;
// 3D
int tid_x = threadIdx.x + blockIdx.x * blockDim.x;
int tid_y = threadIdx.y + blockIdx.y * blockDim.y;
int tid_z = threadIdx.z + blockIdx.z * blockDim.z;
// 3D mapping to 1D
int tid = tid_z * (gridDim.y * blockDim.y) * (gridDim.x * blockDim.x)
+ tid_y * (gridDim.x * blockDim.x)
+ tid_x;
Code
//2D
__global__ void kernel2D() {
int tid_x = threadIdx.x + blockIdx.x * blockDim.x;
int tid_y = threadIdx.y + blockIdx.y * blockDim.y;
int width = gridDim.x * blockDim.x;
int tid = tid_y * width + tid_x;
printf("2D Thread (%d, %d) => tid = %d\n", tid_x, tid_y, tid);
}
int main() {
dim3 blockDim(4, 4); // 每个 block 有 4x4 个线程
dim3 gridDim(2, 2); // 网格是 2x2 个 block
kernel2D<<<gridDim, blockDim>>>();
cudaDeviceSynchronize();
return 0;
}
// 3D
__global__ void kernel3D() {
int tid_x = threadIdx.x + blockIdx.x * blockDim.x;
int tid_y = threadIdx.y + blockIdx.y * blockDim.y;
int tid_z = threadIdx.z + blockIdx.z * blockDim.z;
int width = gridDim.x * blockDim.x;
int height = gridDim.y * blockDim.y;
int tid = tid_z * width * height + tid_y * width + tid_x;
printf("3D Thread (%d, %d, %d) => tid = %d\n", tid_x, tid_y, tid_z, tid);
}
int main() {
dim3 blockDim(2, 2, 2); // 每个 block 是 2x2x2
dim3 gridDim(2, 2, 2); // 网格是 2x2x2 个 block
kernel3D<<<gridDim, blockDim>>>();
cudaDeviceSynchronize();
return 0;
}